
目次
背景
- 黄色い四足歩行ロボットmini pupper 2で遊んだ時の備忘録
- 日本名は、ミニぷぱ
- mini pupper 1の後継機にあたるロボ
Mini pupper 1と2の違い
| 項目 | Mini Pupper 1 | Mini Pupper 2 |
|---|---|---|
| CPU | Raspberry Pi 4B | Raspberry Pi CM4 |
| サイズ | 209×165×145 mm | 209×109×145 mm |
| 重量 | 560 g | 465 g |
| ペイロード | 150 g | 200 g |
| サーボ | PWMサーボ | 位置フィードバック付きシリアルバスサーボ |
| MCU | なし | ESP32-S3 |
| IMU | 公式比較表では N/A | あり |
| タッチセンサー | なし | あり |
| マイク/スピーカー | 外部モジュール | あり |
| OS/ROS | Ubuntu 22.04 / ROS2対応 | Ubuntu 22.04 / ROS2対応 |
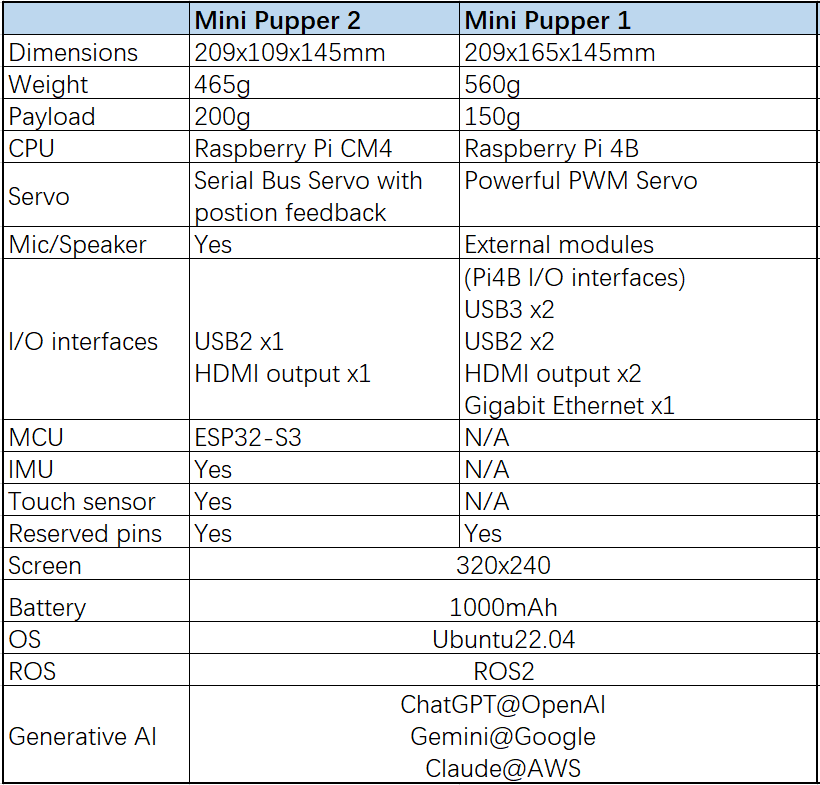
大きな違い:
- Mini Pupper 1 はPWMサーボをRaspberry Pi 4B側から制御する構成
- 一方、Mini Pupper 2 は位置フィードバック付きシリアルバスサーボとESP32-S3が入っているので、脚の状態を読みやすく、制御もしやすい方向に進化している